Hyundai Motor Group (the Group) has started building an initial development model of a lunar exploration mobility rover in tandem with aerospace partners.
In July 2022, the Group signed a joint multilateral research agreement with six Korean research institutes in the aerospace sector to run and support a consultative body to develop a mobility solution for lunar surface exploration.
The consultative body includes Korea Astronomy and Space Science Institute (KASI), Electronics and Telecommunication Research Institute (ETRI), Korea Institute of Civil Engineering and Building Technology (KICT), Korea Aerospace Research Institute (KARI), Korea Atomic Energy Research Institute (KAERI) and Korea Automotive Technology Institute (KATECH).
Following discussions with the various stakeholders, the Group decided the direction for the initial lunar exploration mobility development model. The Group expects to complete the initial test unit as soon as the second half of 2024 and aims to create a model that has launch capability in 2027.
Hyundai Motor Group has consistently stated its goal is to contribute to expanding human reach and the scope of human mobility experiences. The creation of the lunar exploration mobility development model not only reflects this goal, but also shows our ambition to achieve tangible results in the face of significant challenges. With the rover’s development, we are moving beyond land, sea and air mobility to expand into space mobility.
—Yong Wha Kim, Executive Vice President, and Head of R&D Planning & Coordination Center of Hyundai Motor and Kia
For the rover, the Group is utilizing Hyundai Motor Company and Kia Corporation’s advanced robotics and autonomous driving technologies (camera, LiDAR), driving system (motor, wheels, suspension), charging parts (solar panel, battery) as well as Hyundai Rotem’s robot manufacturing technology as part of a multi-purpose mobility platform.
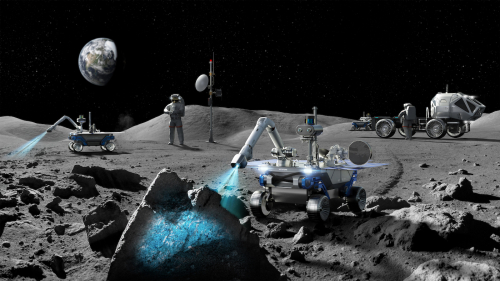
The Group’s components will occupy the lower section of the rover while the upper section will consist of scientific payloads for lunar surface exploration. The rover will have thermal management function and radiation shielding to withstand the extreme environment of the lunar surface.
Once the lower part of the rover is developed, the consultative body expects it to function as a mobility platform, supporting an upper part that will hold a variety of advanced technologies for digging, excavation and human exploration of the lunar surface for resources. Ultimately, the goal is to deliver a universally applicable mobility platform to handle a variety of payloads.
Following development, testing and refinement, the plan is to land the rover near the south pole area of the moon to carry out various scientific missions. The solar-powered, autonomous driving mobility unit will weigh around 70 kg.
Before the rover can be sent to the Moon, the Group will conduct mission-based performance testing of the development model in an environment similar to the Moon’s surface in preparation for lunar mission and make refinements based on the test results.








/cloudfront-us-east-2.images.arcpublishing.com/reuters/2ZUJ55BNAJIOXPUZ54ZYUWKXVE.jpg)




